
Precision-Built Pneumatic End of Arm Tooling for Reliable Robotic Handling
Your robot is only as effective as the tooling attached to it. Coast Pneumatics designs pneumatic end-of-arm tooling that delivers consistent gripping, optimized cycle times, and long-term durability.
Each EOAT is engineered around your product dimensions, material characteristics, line speed, and robot motion profile. From lightweight pick-and-place tooling to multi-function gripping assemblies, we provide solutions that improve throughput and reduce downtime.
Submit your product details, robot model, and cycle time requirements.
Engineered for Speed, Precision, and Robot-Optimized Performance
Effective EOAT balances grip force, weight distribution, part orientation, and cycle-time constraints. Our engineering team designs tooling that meets your robot's payload limits while maintaining fast, repeatable handling across high-volume production runs.
Whether you're moving fragile parts, irregular shapes, or heavy assemblies, we build EOAT systems that integrate seamlessly with your robot platform and reduce wear on both the tooling and the automation system.
What We Build
We design and manufacture custom EOAT solutions tailored to your robot platform, product handling requirements, and production environment.
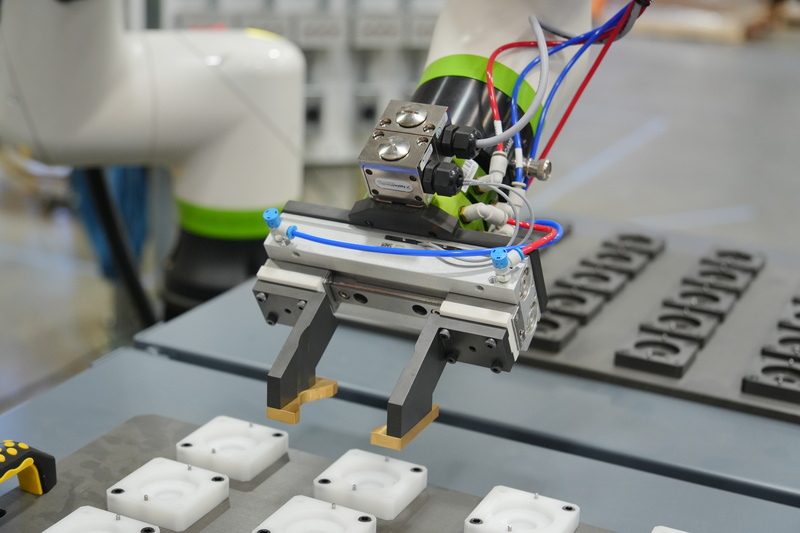
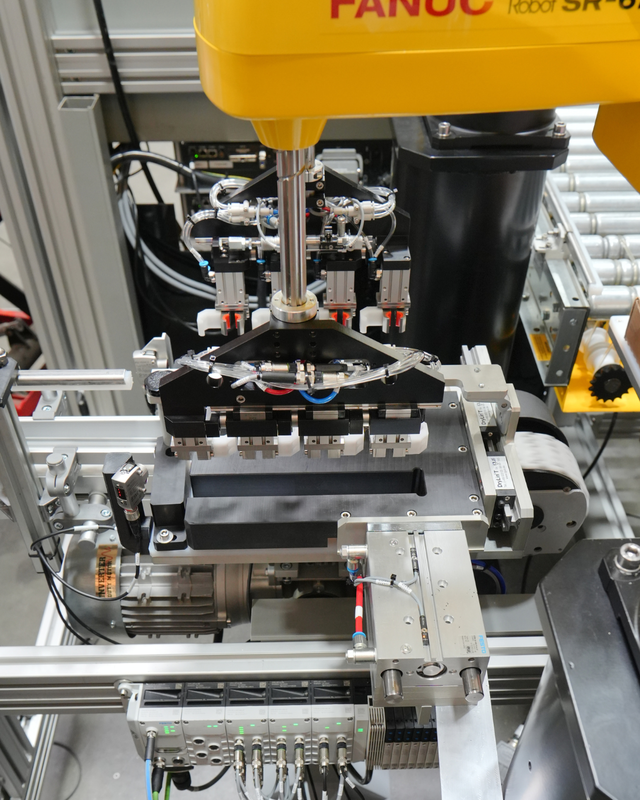
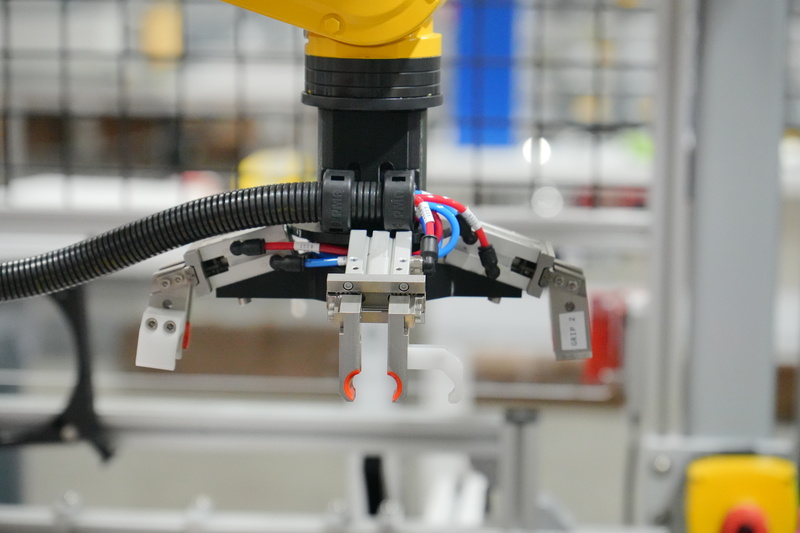
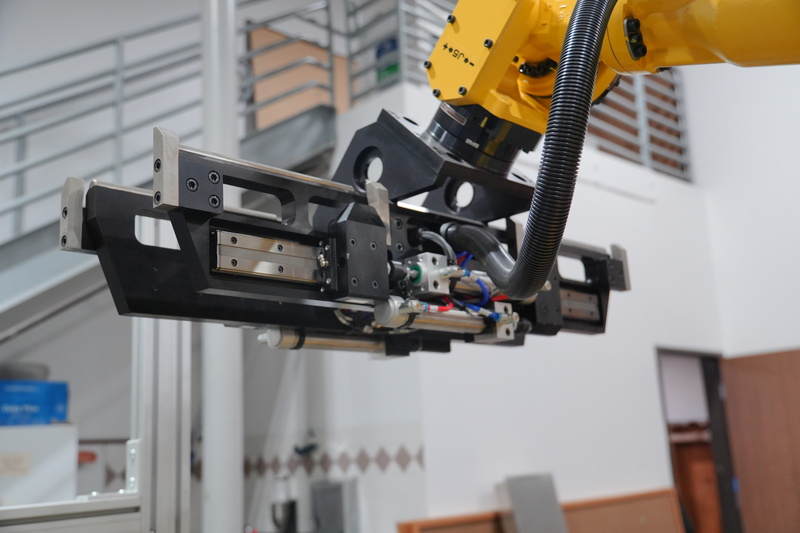
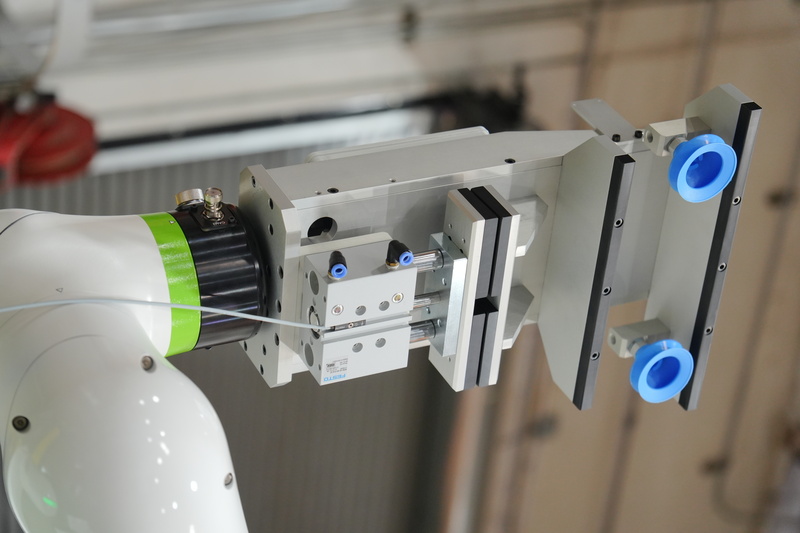
- Vacuum, parallel, angular, or hybrid gripping systems
- Adjustable or multi-zone gripping for varied products
- Custom mounting plates matched to any robot model
- Integrated sensors for part detection or feedback
- Lightweight designs that maintain robot speed and inertia limits
- Durable construction for high-repetition environments
- Ready-to-mount assemblies with pre-tested performance
Applications
Custom EOAT supports a wide range of industries and automation tasks where speed, precision, and reliability are critical.
- High-Speed Pick-and-Place
- Packaging and Palletizing
- Sorting and Kitting Systems
- Assembly Automation
- Material Transfer and Machine Tending
- Food & Beverage Handling
Why Choose Coast Pneumatics
Our EOAT solutions help manufacturers achieve faster cycle times, reduce product damage, and maintain consistent handling across extended production runs. Every tooling assembly is engineered with precision and built for long-term reliability.
How We Build Your EOAT
STEP 1: Application Review
You provide product specs, robot model, cycle time targets, and handling constraints so we can understand your performance requirements.
STEP 2: Engineering & Design
Our team designs the EOAT to optimize grip type, weight distribution, mounting interface, and sensor integration for your robot platform.
STEP 3: Fabrication & Assembly
We fabricate components, integrate pneumatic systems, apply labeling, and assemble the complete EOAT unit.
STEP 4: Testing & Delivery
Every unit is tested for grip force, cycle performance, and sensor functionality to ensure it meets your requirements and performs reliably.
Start Your EOAT Project
Our engineering team will analyze your product, process, payload, and cycle-time needs to recommend the most efficient EOAT design.
FAQ – Pneumatic EOAT
Can you build for any robot platform?
Yes. We support all major industrial and collaborative robot brands.
What product info do I need to send for EOAT design?
Weight, dimensions, material, pick orientation, required cycle time, and whether the part is fragile or rigid.
Can you include sensors or feedback?
Yes—vacuum switches, part detection, and positional sensors can be integrated.
Do you provide prototypes?
We offer prototypes, pilot builds, and full production runs.
What industries use your EOAT solutions?
Packaging, food & beverage, logistics, electronics, medical device assembly, and general manufacturing.
Your Next Step Toward Manufacturing Excellence
Ready to experience the Festo difference in your automation systems? Our engineering team is standing by to help you select the right right FRL system for you application.